

Lancé en 2020 par le constructeur taïwanais ADLink avec le concours d’Intel (lire notre article ici), le contrôleur robotique ROScube-I est l’un des tout premiers équipements de ce type à prendre en charge l’hyperviseur temps réel ACRN de la Linux Foundation. ...Pour rappel, la version 2.0 de l’hyperviseur open source ACRN a élargi sa portée et défini une nouvelle architecture hybride pour répondre aux besoins de l’IoT industriel et des équipements edge. Architecture qui apporte en particulier une flexibilité dans le partage des ressources, des capacités temps réel et des niveaux de sûreté de fonctionnement aptes à répondre aux besoins d’applications exigeantes sur les marchés de l’industriel (et de l’automobile).
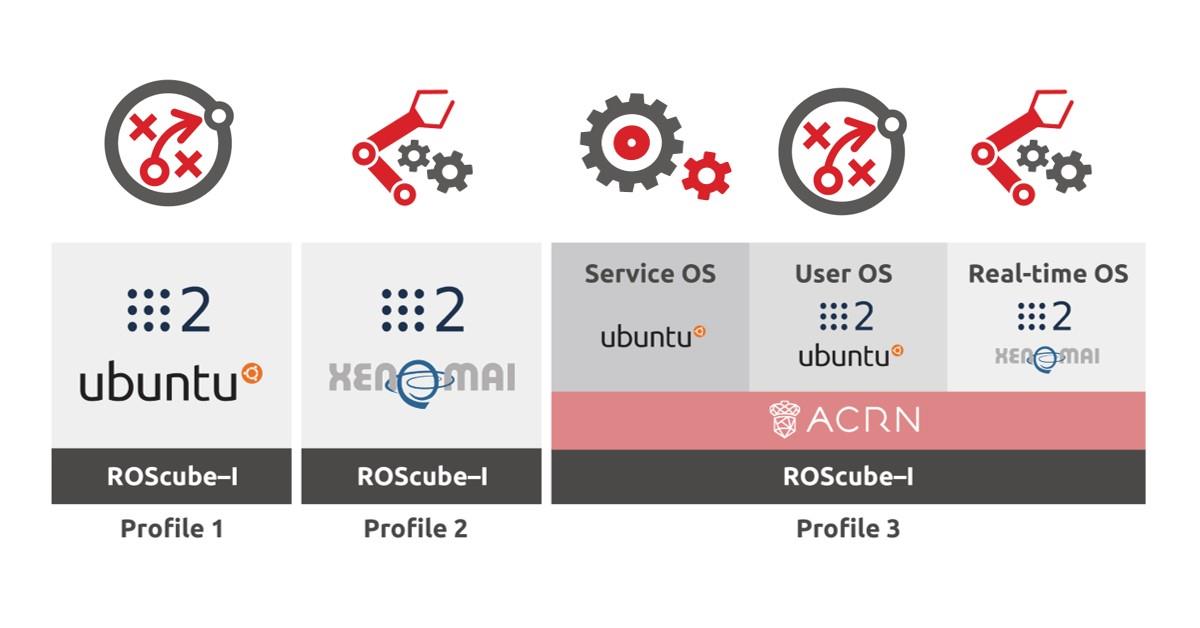
ADLink et Intel, au même titre que les sociétés Aptiv, LG Electronics, Neusoft et TTTech, sont particulièrement engagés dans le projet open source ACRN lancé en 2018 par la fondation Linux. Construit avec la sûreté de fonctionnement en environnement temps réel à l'esprit, ACRN définit un hyperviseur et une architecture pour exécuter plusieurs sous-systèmes logiciels, gérés en toute sécurité sur un système consolidé à l'aide d'un gestionnaire de machine virtuelle (VMM). L'hyperviseur tire parti de la technologie de virtualisation Intel (Intel VT) et prend en charge les VM User et Service pour exécuter un système d'exploitation « utilisateur » et un système d'exploitation « service », une machine virtuelle temps réel (RTVM), ainsi qu’un système d'exploitation temps réel tel que Xenomai (voir illustration).
En raison de ses capacité temps réel, RTVM peut être utilisé pour les applications d’automate programmable (PLC) logiciel, les communications interprocessus (IPC) et les applications robotiques, précise ADLink.
« L'adoption d’ACRN par ADLink est un témoignage de la maturité du projet, capable de fournir un hyperviseur open source temps réel pour les applications les plus exigeantes, s’est réjoui Eddie Dong, architecte et mainteneur du projet. L'utilisation de l'hyperviseur ACRN pour consolider des charges de travail hétérogènes apporte une valeur ajoutée et libère la puissance de calcul de la plate-forme ROSCube-I. » La famille ROScube-I, bâtie sur le processeur Intel Xeon E, les processeurs Intel Core i7/i3 de 9e génération ou Intel Core i5 de 8e génération, ainsi que sur l’environnement Intel Edge Controls for Industrial, est donc désormais l'un des premiers contrôleurs robotiques compatibles ROS 2 validés pour l’hyperviseur temps réel ACRN.
« La virtualisation est particulièrement importante dans les environnements industriels en raison de la longévité des équipements et des applications, note Ryan Chen, directeur du groupe Advanced Robotic Platform d’ADLink. La virtualisation permet aux usines de moderniser l’architecture matérielle de leurs contrôleurs robotiques en utilisant des machines virtuelles capables d’exécuter des systèmes de contrôle/commande et des systèmes d'exploitation historiques bien au-delà de leurs dates de retraite prévues. Nos clients peuvent tirer parti de cette technologie sur le contrôleur ROScube-I pour, par exemple, exécuter des interfaces homme-machine (IHM) sur l’OS User, exécuter des algorithmes d’intelligence artificielle sur l’OS Service et laisser certains traitements s'exécuter sur des automates programmables logiciels qui nécessitent des caractéristiques temps réel strictes. »



