Le comité technique de l’organisme ETG (EtherCAT Technology Group) a formellement approuvé la spécification EtherCAT G en tant qu’extension du standard de bus de terrain industriel EtherCAT qui pousse le débit à 1 Gbit/s voire 10 Gbit/s. ...La technologie EtherCAT G a été élaborée en 2018 par la société Beckhoff Automation pour répondre aux besoins des applications particulièrement consommatrices de données.
« EtherCAT est déjà le bus de terrain Ethernet industriel le plus rapide et il le restera en raison de ses principes de fonctionnement spécifiques, indique Guido Beckman, le chairman du comité technique de l’ETG. Avec l’EtherCAT G, les applications "datavores" telles que la vision artificielle et les mesures haut de gamme peuvent désormais être intégrées à l’écosystème. »
Les performances de l’EtherCAT traditionnel à 100 Mbit/s suffisent amplement pour la majorité des applications, précise toutefois l’organisme industriel, mais l’EtherCAT G offre des avantages supplémentaires, tout particulièrement pour les applications où des masses particulièrement volumineuses de données de processus doivent être véhiculées, ce qui est le cas des caméras de vision, des systèmes de contrôle de mouvement complexes ou des composants de mesure dotés de taux d’échantillonnage très élevés.
L’extension EtherCAT G est par ailleurs compatible avec les spécifications EtherCAT et les deux technologies peuvent être exploitées dans un réseau mixte. Ainsi les esclaves EtherCAT G fonctionnent dans un réseau EtherCAT à 100 Mbit/s et vice-versa. Dans ces deux cas de figure, tous les périphériques EtherCAT G commutent sur le mode à 100 Mbit/s.
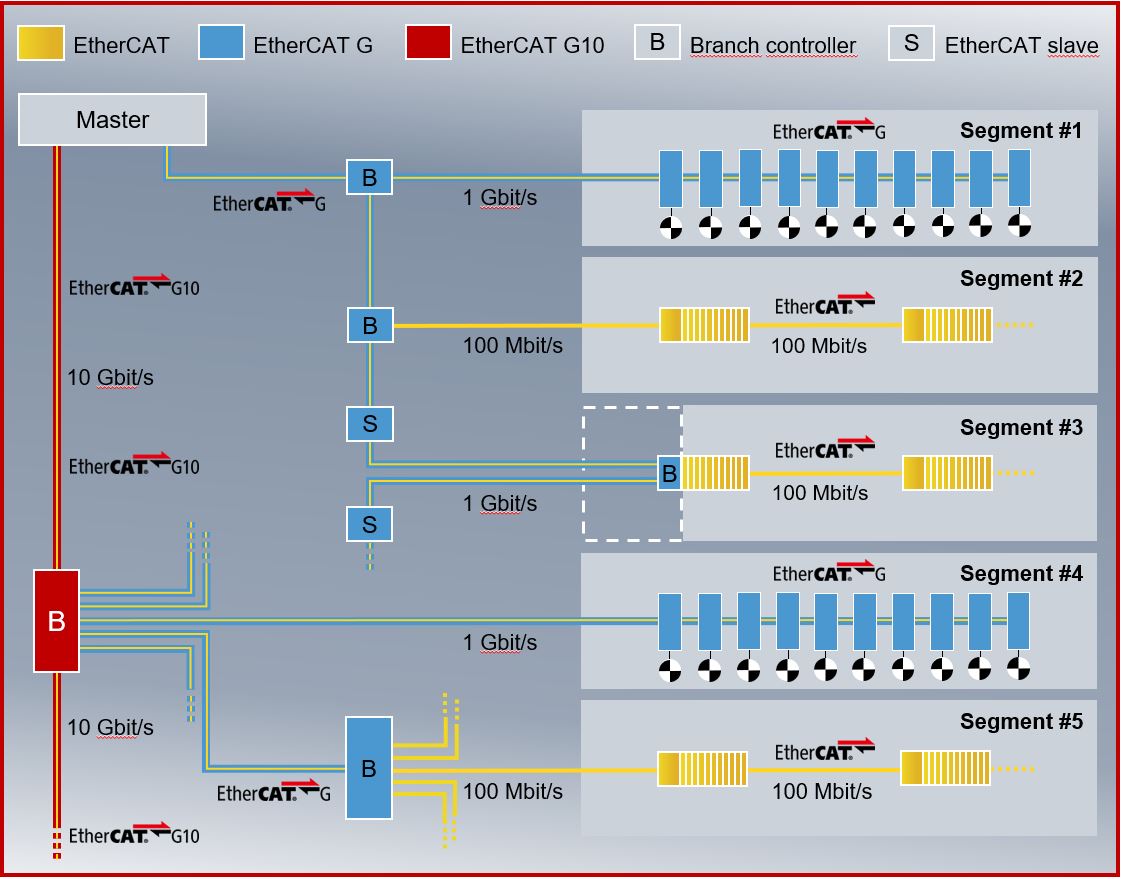
En revanche, avec le nouveau concept de « contrôleur de branche » pour EtherCAT G, il est possible de gérer des branches EtherCAT qui permettent d’exploiter en parallèle des segments de 100 Mbit/s dans un réseau de 1 Gbit/s grâce à une conversion des vitesses adaptée. Ces contrôleurs de branche autorisent aussi un traitement en parallèle sur les différents segments EtherCAT connectés avec, en conséquence, une réduction des délais de propagation pour une performance globale améliorée.