

En lançant le logiciel de démarrage rapide Perception, taillé pour sa puce-système pour caméras frontales de voitures autonomes et semi-autonomes R-Car V3H, la société de semi-conducteurs Renesas cherche à faciliter le travail des développeurs de systèmes évolués d’assistance à la conduite automobile ADAS. ...
La solution fournit un logiciel de référence pour la détection d’obstacles par caméra (COD), la détection d’obstacles par lidar (LOD) et la détection des caractéristiques de la route (RFD), trois éléments clés des systèmes de reconnaissance automatisés de niveau 2+ reposant sur l’usage de capteurs.
Architecturé autour de quatre cœurs ARM Cortex-A53 cadencés à 1 GHz et d’un double cœur temps réel Cortex-R7 configuré en mode lockstep, le R-Car V3H intègre des accélérateurs matériels conçus pour l’exécution d’algorithmes du type Dense Optical Flow (pour le suivi précis du mouvement des objets), Dense Stereo Disparity (pour la mesure des distances en 3D en utilisant tous les pixels d’une image vidéo) ou Object Classification (pour l’identification des objets). Le SoC dispose d'ailleurs à cet effet d’un bloc spécifique réservé à l’exécution de réseaux de neurones à convolution (CNN) et à l’accélération des algorithmes d’apprentissage profond, et ce pour des niveaux de consommation très faibles (0,3 W seulement), précise la société de semi-conducteurs.
Selon Renesas, le nouveau logiciel de perception fournit aux développeurs travaillant avec ces accélérateurs complexes une référence de pipeline de bout en bout qui permet aux clients de démarrer rapidement la conception de leurs applications, qu’ils soient experts dans l’usage d’accélérateurs ou qu’ils en aient une expérience limitée. Le logiciel de référence se charge de toutes les étapes de traitement, de l’entrée à partir d'un capteur ou de données enregistrées jusqu’à l'affichage sur un écran.
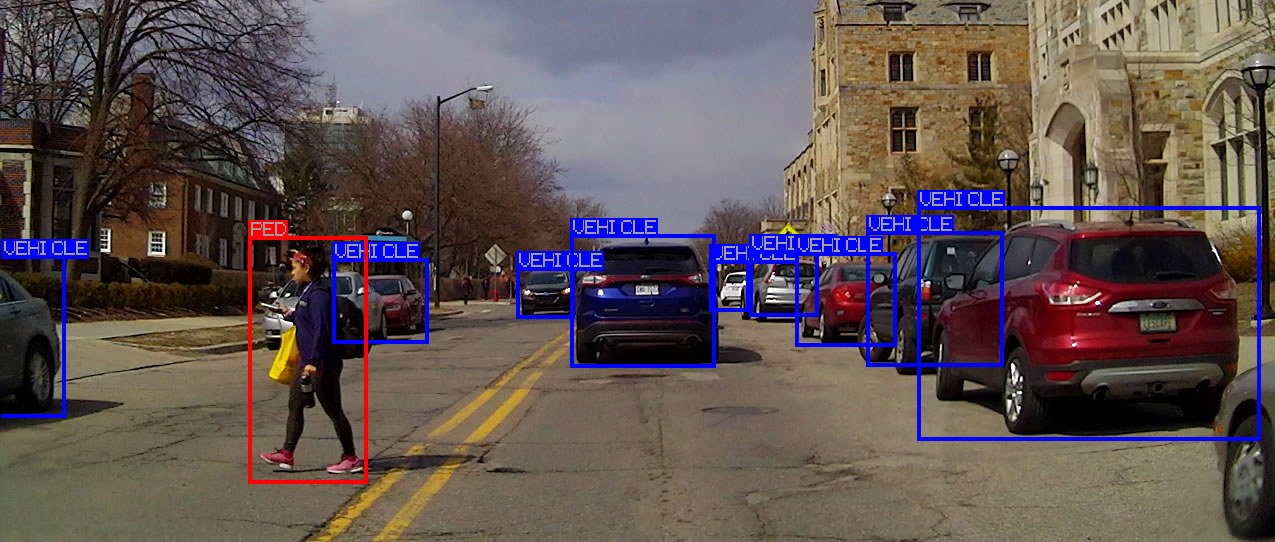 A titre d’exemple, le logiciel de référence COD utilise l’accélérateur CNN, le moteur de vision artificielle CV-E et les technologies de rendu d’image de la puce-système R-Car V3H pour détecter des objets 2D tels que voitures, camions, bus et piétons, et ce à une vitesse de rafraîchissement d’image de 30 images par seconde (photo ci-contre). Le logiciel LOD, quant à lui, permet de détecter des objets 3D dont voitures et camions jusqu’à 50 mètres à une cadence de 15 images par seconde. Le logiciel RFD enfin est capable d’identifier les espaces libres, les voies, les limites des routes et les distance par rapport aux voies et aux objets proches.
A titre d’exemple, le logiciel de référence COD utilise l’accélérateur CNN, le moteur de vision artificielle CV-E et les technologies de rendu d’image de la puce-système R-Car V3H pour détecter des objets 2D tels que voitures, camions, bus et piétons, et ce à une vitesse de rafraîchissement d’image de 30 images par seconde (photo ci-contre). Le logiciel LOD, quant à lui, permet de détecter des objets 3D dont voitures et camions jusqu’à 50 mètres à une cadence de 15 images par seconde. Le logiciel RFD enfin est capable d’identifier les espaces libres, les voies, les limites des routes et les distance par rapport aux voies et aux objets proches.
Vous pouvez aussi suivre nos actualités sur la vitrine LinkedIN de L'Embarqué consacrée à l’intelligence artificielle dans l’embarqué : Embedded-IA https://www.linkedin.com/showcase/embedded-ia/



