Les évolutions profondes en cours sur le secteur de l’automobile – intégration de calculateurs embarqués haute performance, communications haut débit au sein du véhicule et vers l'extérieur, connexions au cloud... – ont amené le consortium ...Autosar (AUTomotive Open System ARchitecture) a évolué. En charge de la spécification d’une architecture logicielle ouverte et standardisée pour les unités de contrôle/commande électroniques (ECU) des automobiles, l'organisme s’est en effet restructuré au cours des dix-huit derniers mois et planifié le développement d’une plate-forme logicielle de nouvelle génération, dénommée plate-forme "adaptative".
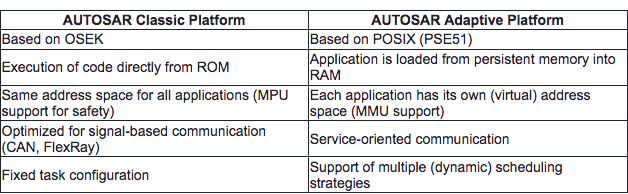
Rappelons que les spécifications Autosar ont pour objectif de structurer le logiciel embarqué dans les automobiles sous la forme de modules fonctionnels (les SWC, Software Components) dotés d’une interface standardisée, afin de simplifier l’intégration de ces modules et leur réutilisation pendant la durée de vie d’un véhicule. La plate-forme adaptative R 17-03 s’appuie sur les mêmes concepts que cette approche dite "classique". Mais elle ajoute à la description des interfaces pour ECU à haut niveau de sécurité et de sureté de fonctionnement qui sont pilotées par des microcontrôleurs avec des contraintes temps réel “dures”, celle d'interfaces pour ECU multimédias architecturées sur des processeurs mono ou multicœurs.
 De plus, et ce n’est pas la moindre des évolutions, le consortium Autosar accompagne la sortie des spécifications de la plate-forme adaptative d’une implantation logicielle de référence. Un moyen de minimiser les inévitables ambiguïtés liées à l’interprétation des spécifications (qui ne sont que du texte) lorsqu’il s'agit de les transformer en code exécutable, avec les risques de mauvaise interopérabilité entre composants logiciels développés par des équipementiers, des sociétés de services, des éditeurs de logiciels, etc.
De plus, et ce n’est pas la moindre des évolutions, le consortium Autosar accompagne la sortie des spécifications de la plate-forme adaptative d’une implantation logicielle de référence. Un moyen de minimiser les inévitables ambiguïtés liées à l’interprétation des spécifications (qui ne sont que du texte) lorsqu’il s'agit de les transformer en code exécutable, avec les risques de mauvaise interopérabilité entre composants logiciels développés par des équipementiers, des sociétés de services, des éditeurs de logiciels, etc.
Le consortium a aussi décidé de publier des mises jour de cette plate-forme tous les six mois et non plus tous les ans (voire plus), pour suivre au plus prés les évolutions rapides des technologies embarquées dans les voitures.
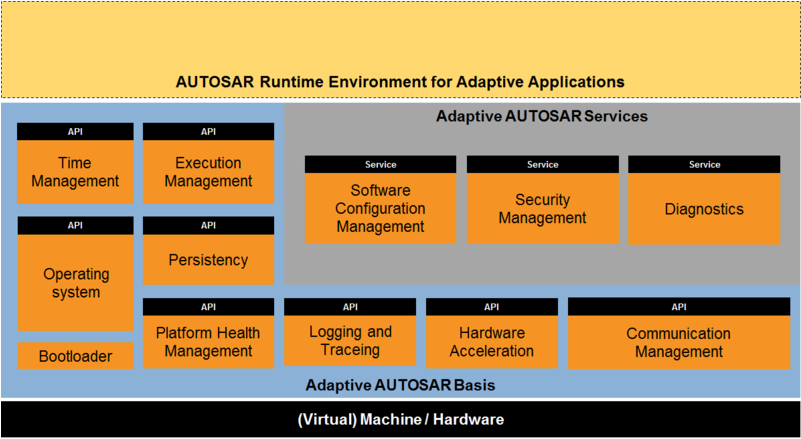
Concrètement, la plate-forme adaptative s'appuie, à côté des API traditionnelles, sur des clusters fonctionnels aptes à gérer applications et "services", une notion qui fait ici son apparition. Les mécanismes intégrés dans la plate-forme adaptative vont permettre de démarrer et d’arrêter des applications en toute sécurité à travers un gestionnaire d’exécution (Execution Manager), tout en autorisant l'ajout et la suppression à distance d'applications.
Au sein de la plate-forme adaptative, le support de divers systèmes d'exploitation est permis via l'intégration d'un sous-ensemble des API Posix (le profil PSE51 défini par l’IEEE en l'occurrence). Des fonctions supplémentaires, comme le diagnostic ou la surveillance dans le temps du comportement des composants matériels sont aussi à l’ordre du jour. Par ailleurs un gestionnaire de communication (Communication Manager) permet la mise en œuvre de communications orientées services entre "clients" et "services" avec la possibilité pour les premiers de reconnaître et d'utiliser les seconds. Cette fonctionnaité s'appuie sur une abstraction du protocole Some/IP (Scalable service-Oriented MiddlewarE over IP) qui offre la possibilité d’ajouter de nouveaux clients ou services et autorise une communication simplifiée avec les ECU embarquant une pile Autosar "classique".
Enfin, la mise à disposition d’un fichier de journalisation des traces de débogage, un mécanisme d’extraction des erreurs logicielles et le support du calcul parallèle rapide sur des processeurs graphiques sont en cours de développement.




 300x250px.png)