Voiture autonome et connectée : Renesas multiplie les accords avec des éditeurs de logiciels[EDITION ABONNES] [CES 2018] A l’instar d’autres fabricants de semi-conducteurs présents depuis longtemps sur le marché automobile comme Infineon, NXP ou STMicroelectronics, Renesas n’entend pas céder du terrain face à de nouveaux entrants aux dents longues comme Intel, Nvidia ou Qualcomm. ...La société japonaise multiplie à cet égard les collaborations avec des éditeurs de logiciels afin de compléter son offre sur le marché en ébullition des véhicules connectés ou semi-autonomes. On se souviendra ainsi qu’en décembre dernier, Renesas a entamé une collaboration avec la jeune société française Dibotics, créée en 2015 et spécialisée dans le traitement lidar 3D en temps réel, afin de développer une solution lidar embarquée de qualité automobile, adaptée aux contraintes des systèmes d’assistance évoluée à la conduite (ADAS) et des applications de conduite autonome. Cette solution commune, bâtie sur la puce-système (SoC) automobile de traitement d’image hautes performances et basse consommation R-Car du Japonais, devra permettre aux équipementiers de développer des systèmes de cartographie 3D en temps réel caractérisés à la fois par un haut niveau de sûreté de fonctionnement et une faible consommation électrique (lire notre article ici).
Le R-Car V3M intègre en sus un double cœur Cortex-A53 pour la programmation applicative ainsi qu’un double cœur Cortex-R7 configuré en mode lockstep pour l’exécution des logiciels Autosar. De quoi, martèle Renesas, assurer un niveau de sûreté de fonctionnement minimal de niveau Asil-C. Dans une optique de réduction des coûts, le fournisseur de semi-conducteurs a également intégré sur la puce un processeur dédié au traitement d’image (ISP) dont la fonction est d’améliorer la qualité de l’image brute issue du capteur de la caméra et de la « préparer » pour la vision artificielle. Enfin, le SoC ne dispose que d’un seul canal mémoire DDR3L pour abaisser encore le coût. « Le marché des caméras embarquées à l’avant des véhicules devrait dépasser les 200 millions de pièces d’ici à cinq ans, indique Ian Riches de la société d’études Strategy Analytics. Cette forte progression est tirée par l’adoption rapide des fonctions de sécurité imposées par le programme NCAP (New Car Assessment Program) comme le freinage automatique d’urgence, l’alerte en cas de détection de sortie de voie ou la reconnaissance de panneaux de signalisation. » « Les opportunités de marché pour les applications de caméras embarquées à l’avant des véhicules augmentent à grande vitesse et les équipementiers et constructeurs recherchent aujourd’hui une solution ouverte qui a fait ses preuves, ajoute Jean-François Chouteau, vice-président en charge du centre mondial ADAS de Renesas. C’est la raison pour laquelle nous avons décidé de combiner le logiciel éprouvé de Hella Aglaia à la plate-forme Renesas autonomy. » Cette plate-forme, rappelons-le, se veut un environnement de confiance « ouvert » et évolutif pour les systèmes d’assistance évoluée à la conduite et de pilotage automatisé. (La puce-système R-Car H3 et le microcontrôleur RH850/V1R, conçu pour le contrôle de radars automobiles embarqués, seraient eux aussi compatibles avec l’environnement.) Si l’on en croit le Japonais, l’environnement Renesas autonomy couvrira tous les blocs fonctionnels ad hoc, de la détection jusqu’à la connexion sécurisée au cloud, en passant par la prise de décision et les fonctions de contrôle/commande du véhicule (ce dernier créneau étant le point fort de Renesas).
Parallèlement, le fabricant de semi-conducteurs s’est rapproché de l’éditeur Airbiquity, spécialisé dans les services pour véhicules connectés, pour proposer une solution automobile de mise à jour over-the-air (OTA) pour les applications ADAS, V2X (Vehicle-to-Everything) et de conduite autonome du futur. Cette solution est issue de l’intégration du service de gestion des données et des mises à jour logicielles à partir du cloud OTAmatic d’Airbiquity à la plate-forme de calcul basse consommation R-Car H3 du Japonais. L’ensemble est conforme aux exigences du standard de sûreté de fonctionnement ISO 26262, assure Renesas. Le service OTAmatic, dans la pratique, vise à orchestrer et automatiser en toute sécurité les campagnes de mises à jour logicielles et de collecte de données sur de multiples unités de contrôle/commande électroniques (ECU) embarquées à bord des véhicules connectés. Le service, qui peut être déployé à partir du cloud Choreo d’Airbiquity, de plates-formes publiques comme Microsoft Azure ou AWS ou de centres de données privés, dispose d’une fonction sophistiquée de gestion en back-end qui permet d'affiner le ciblage, la configuration et la validation des campagnes de mises à jour, tant en termes de couverture géographique que de volume.
|
 Renesas s’est aussi rapproché de la société allemande Hella Aglaia Mobile Vision pour développer une solution de caméra avant « ouverte et échelonnable » pour systèmes ADAS et conduite semi-autonome. Celle-ci s’appuie sur le SoC de reconnaissance d’image R-Car V3M et le logiciel pour caméra embarquée de Hella Aglaia, conçu pour répondre aux besoins de la conduite automatisée partielle (Niveau 2) et conditionnelle (Niveau 3) du standard SAE J3016. Tout juste échantillonnée, la puce R-Car V3M implémente un moteur de reconnaissance d’image (IMP) et un moteur de vision artificielle (CVE) qui permettent au circuit d’exécuter des algorithmes du type traitement du défilement visuel (optical flow) et détection d’objets ainsi que des réseaux de neurones à convolution pour la classification desdits objets.
Renesas s’est aussi rapproché de la société allemande Hella Aglaia Mobile Vision pour développer une solution de caméra avant « ouverte et échelonnable » pour systèmes ADAS et conduite semi-autonome. Celle-ci s’appuie sur le SoC de reconnaissance d’image R-Car V3M et le logiciel pour caméra embarquée de Hella Aglaia, conçu pour répondre aux besoins de la conduite automatisée partielle (Niveau 2) et conditionnelle (Niveau 3) du standard SAE J3016. Tout juste échantillonnée, la puce R-Car V3M implémente un moteur de reconnaissance d’image (IMP) et un moteur de vision artificielle (CVE) qui permettent au circuit d’exécuter des algorithmes du type traitement du défilement visuel (optical flow) et détection d’objets ainsi que des réseaux de neurones à convolution pour la classification desdits objets.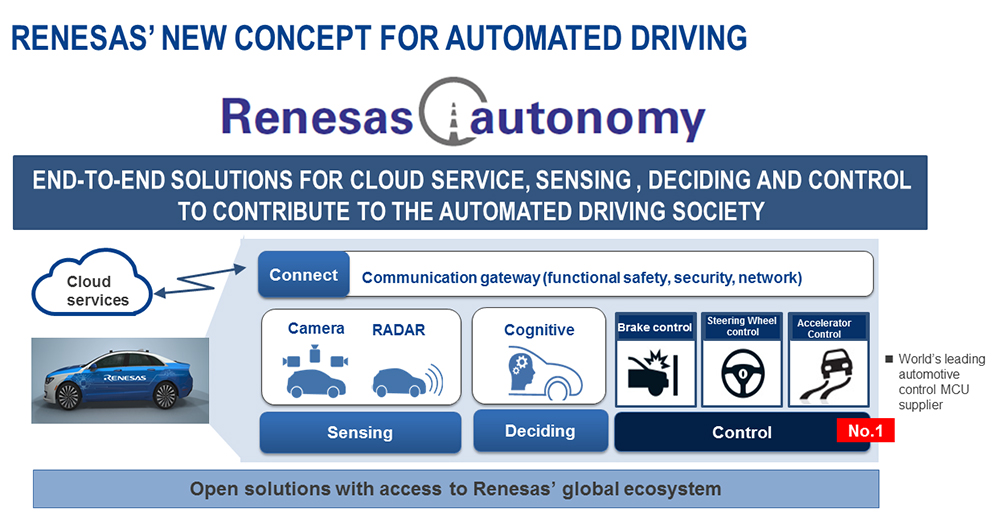
 Pour être complet ajoutons que Renesas a signé en 2017 un accord avec l’éditeur écossais Codeplay pour apporter le langage de programmation pour architectures multicoeurs hétérogènes OpenCL et la couche logicielle de haut niveau SYCL sur les puces-systèmes R-Car H3 et R-Car V3M (lire notre article ici). Dans ce cadre, le fournisseur de semi-conducteurs compte lancer au cours du premier trimestre 2018 en quantités limitées un kit de démarrage R-Car V3M équipé d’un BSP Linux et des frameworks OpenCL et SYCL et conçu pour simplifier et accélérer le développement d’applications de caméras frontales, d’environnements de vision panoramique et de systèmes à lidar conformes aux exigences NCAP. On trouve aussi sur le kit, outre le SoC R-Car V3M, 2 Go de RAM, 4 Go de mémoire eMMC, des interfaces Ethernet, des sorties pour afficheurs et des interfaces pour débogage ainsi qu’un connecteur d’extension à 440 broches pour l’insertion de cartes d’extension spécifiques aux applications ciblées.
Pour être complet ajoutons que Renesas a signé en 2017 un accord avec l’éditeur écossais Codeplay pour apporter le langage de programmation pour architectures multicoeurs hétérogènes OpenCL et la couche logicielle de haut niveau SYCL sur les puces-systèmes R-Car H3 et R-Car V3M (lire notre article ici). Dans ce cadre, le fournisseur de semi-conducteurs compte lancer au cours du premier trimestre 2018 en quantités limitées un kit de démarrage R-Car V3M équipé d’un BSP Linux et des frameworks OpenCL et SYCL et conçu pour simplifier et accélérer le développement d’applications de caméras frontales, d’environnements de vision panoramique et de systèmes à lidar conformes aux exigences NCAP. On trouve aussi sur le kit, outre le SoC R-Car V3M, 2 Go de RAM, 4 Go de mémoire eMMC, des interfaces Ethernet, des sorties pour afficheurs et des interfaces pour débogage ainsi qu’un connecteur d’extension à 440 broches pour l’insertion de cartes d’extension spécifiques aux applications ciblées.