Nvidia met la virtualisation au menu du SoC Parker pour calculateur de voiture autonome[EDITION ABONNES] Cet été, Nvidia a dévoilé quelques détails sur le circuit intégré SoC de nouvelle génération Parker, qui alimente la plate-forme de calcul pour voitures autopilotées Drive PX 2 annoncée en début d'année. ... A l’occasion du CES 2016, Nvidia avait présenté la deuxième génération de sa plate-forme de calcul pour voitures autopilotées dont la disponibilité générale est prévue pour le quatrième trimestre. Mais, à l’époque, la société américaine avait été peu diserte sur les détails du processeur embarqué sur la Drive PX 2, destinée à succéder à la plate-forme Drive PX, basée, elle, sur deux Tegra X1 et déjà dotée de fonctions d’apprentissage dites « en profondeur » (deep learning).
Selon Nvidia, cette structure déploie une performance multicœur de 50 à 100 supérieure à celle d’autres processeurs mobiles. Sur la même puce, on trouve aussi une unité de traitement Pascal à 256 cœurs Cuda pour l’exécution d’algorithmes d’inférence pour l’apprentissage profond et les calculs graphiques nécessaires à l’affichage sur plusieurs écrans à haute résolution (tableau de bord, afficheur d’info-divertissement, etc.). Au-delà des cœurs CPU et GPU, le SoC Parker embarque également des moteurs d’encodage et de décodage de flux vidéo 4K à 60 images/s, une double interface CAN (pour la connexion à des ECU automobiles) et une interface Gigabit Ethernet pour le transport de données audio et vidéo. La conformité ISO 26262 est assurée par l’intégration dans le silicium d’un certain nombre de fonctions de sûreté de fonctionnement (et, notamment, d’un moteur dédié à la détection et au traitement de fautes).
Dans le cas d’opérations génériques de calcul en virgule flottante, la plate-forme Drive PX 2, rappelons-le, peut également traiter jusqu’à 8 000 milliards d’opérations par seconde, soit quatre fois plus que la génération précédente. De quoi, selon Nvidia, exécuter toute une gamme d’algorithmes de conduite autonome tels que fusion de capteurs, localisation et planification de trajectoire. A ce titre, la plate-forme peut traiter des signaux issus de 12 caméras vidéo, de lidars, de radars et de capteurs à ultrasons pour effectuer de la détection et de l’identification d’objets, calculer la position du véhicule par rapport à son environnement et optimiser le trajet pour une conduite sûre. Si l’on en croit Nvidia, plus de quatre-vingts constructeurs automobiles, équipementiers de premier rang et instituts de recherche utilisent déjà la plate-forme Drive PX 2 dans le cadre de projets de véhicules autonomes. A des fins de tests, Volvo compte en équiper une centaine de SUV de luxe qui pourront en 2017 sillonner en toute autonomie la ville de Göteborg (et en semi-autonomie partout ailleurs). |
 Tout juste avait-on appris que la bien nommée Drive PX 2 (photo ci-contre) allait combiner deux processeurs Tegra « de nouvelle génération » ainsi que deux unités graphiques (GPU) discrètes à architecture Pascal (successeur de l’architecture Maxwell). La plate-forme s'avérerait capable de déployer une puissance de traitement de 24 000 milliards d’opérations d’apprentissage automatique par seconde, une valeur dix fois supérieure à celle de la Drive PX. Une capacité d’apprentissage en profondeur qui, selon Nvidia, va lui permettre de s’adapter rapidement aux défis de la conduite de tous les jours (présence de débris sur la route, pratique erratique de certains conducteurs, travaux sur la chaussée, etc.). Et qui va aussi répondre à des problématiques auxquelles les techniques traditionnelles de vision artificielle s’avèrent insuffisantes, notamment lorsque les conditions météo ou de luminosité sont difficiles (pluie, neige, brouillard, aube, crépuscule, nuit profonde…).
Tout juste avait-on appris que la bien nommée Drive PX 2 (photo ci-contre) allait combiner deux processeurs Tegra « de nouvelle génération » ainsi que deux unités graphiques (GPU) discrètes à architecture Pascal (successeur de l’architecture Maxwell). La plate-forme s'avérerait capable de déployer une puissance de traitement de 24 000 milliards d’opérations d’apprentissage automatique par seconde, une valeur dix fois supérieure à celle de la Drive PX. Une capacité d’apprentissage en profondeur qui, selon Nvidia, va lui permettre de s’adapter rapidement aux défis de la conduite de tous les jours (présence de débris sur la route, pratique erratique de certains conducteurs, travaux sur la chaussée, etc.). Et qui va aussi répondre à des problématiques auxquelles les techniques traditionnelles de vision artificielle s’avèrent insuffisantes, notamment lorsque les conditions météo ou de luminosité sont difficiles (pluie, neige, brouillard, aube, crépuscule, nuit profonde…).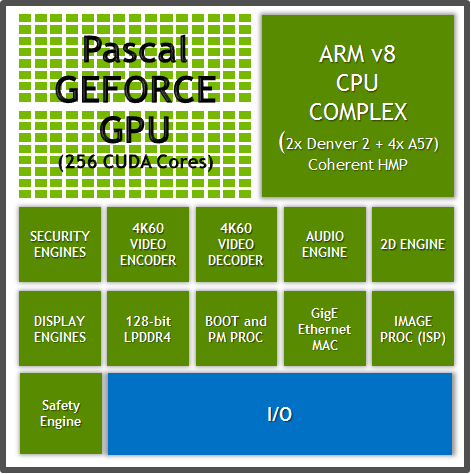 Durant l’été, Nvidia a toutefois révélé quelques détails sur le processeur au cœur de la Drive PX 2, en l’occurrence un circuit intégré de type SoC dénommé Parker (photo ci-contre). Capable de développer une performance de 1,5 Tflops, le circuit repose en pratique sur la microarchitecture CPU Denver de prochaine génération et l’architecture GPU éco-efficace Pascal. Plus précisément, le SoC se développe autour de deux cœurs de processeur Denver 64 bits (Denver 2.0), basés sur une implémentation « maison » du jeu d’instructions ARMv8-A et reliés à quatre cœurs 64 bits ARM Cortex-A57 via une matrice d’interconnexion propriétaire, le tout fonctionnant dans une configuration multiprocesseur hétérogène cohérente.
Durant l’été, Nvidia a toutefois révélé quelques détails sur le processeur au cœur de la Drive PX 2, en l’occurrence un circuit intégré de type SoC dénommé Parker (photo ci-contre). Capable de développer une performance de 1,5 Tflops, le circuit repose en pratique sur la microarchitecture CPU Denver de prochaine génération et l’architecture GPU éco-efficace Pascal. Plus précisément, le SoC se développe autour de deux cœurs de processeur Denver 64 bits (Denver 2.0), basés sur une implémentation « maison » du jeu d’instructions ARMv8-A et reliés à quatre cœurs 64 bits ARM Cortex-A57 via une matrice d’interconnexion propriétaire, le tout fonctionnant dans une configuration multiprocesseur hétérogène cohérente.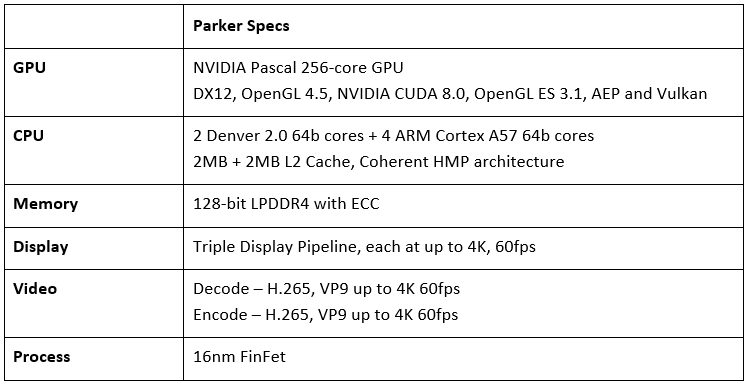 Le circuit de Nvidia implémente en outre une technologie de virtualisation gravée pour partie dans le silicium et apte à l’exécution de huit machines virtuelles. Du coup, précise Nvidia, la plate-forme Drive PX 2, qui fait se côtoyer deux Parker et deux processeurs graphiques discrets Pascal supplémentaires, peut héberger simultanément et parallèlement plusieurs environnements applicatifs hôtes comme des systèmes d’info-divertissement automobiles, des tableaux de bord numériques ou des systèmes d’assistance évoluée à la conduite.
Le circuit de Nvidia implémente en outre une technologie de virtualisation gravée pour partie dans le silicium et apte à l’exécution de huit machines virtuelles. Du coup, précise Nvidia, la plate-forme Drive PX 2, qui fait se côtoyer deux Parker et deux processeurs graphiques discrets Pascal supplémentaires, peut héberger simultanément et parallèlement plusieurs environnements applicatifs hôtes comme des systèmes d’info-divertissement automobiles, des tableaux de bord numériques ou des systèmes d’assistance évoluée à la conduite.