Le britannique Sundance Multiprocessor Technology, fournisseur et fabricant de modules processeurs, propose avec la carte VCS-1, une plate-forme intégrée au standard PC/104 conçue spécifiquement pour la robotique de précision, avec en ligne de mire des applications de vision, de contrôle et d’acquisition de données temps réel issues de capteurs.... La carte (90 x 96 mm, 300 g, consommation typique de 15 W) est architecturée autour d’un circuit MPSoC Zynq de Xilinx, monté sur la carte PC/104 via un module (SoM, System On Module). Le Zynq intègre un processeur à quatre cœurs 64 bits Arm Cortex-A53, une unité de traitement Arm Mali-400 pour l’accélération graphique et une unité de traitement à cœur Arm Cortex-R5 pour la gestion d’événements en temps réel. Le tout associé à la logique programmable d’un FPGA pour l’accélération matérielle des algorithmes mis en œuvre pour le traitement d’image.
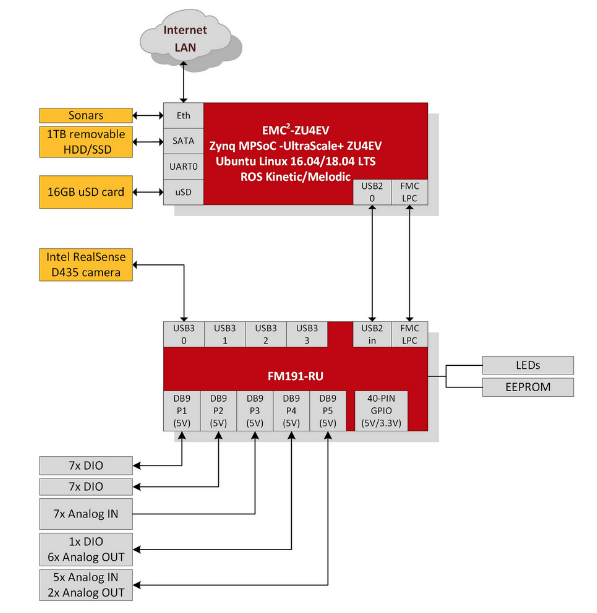
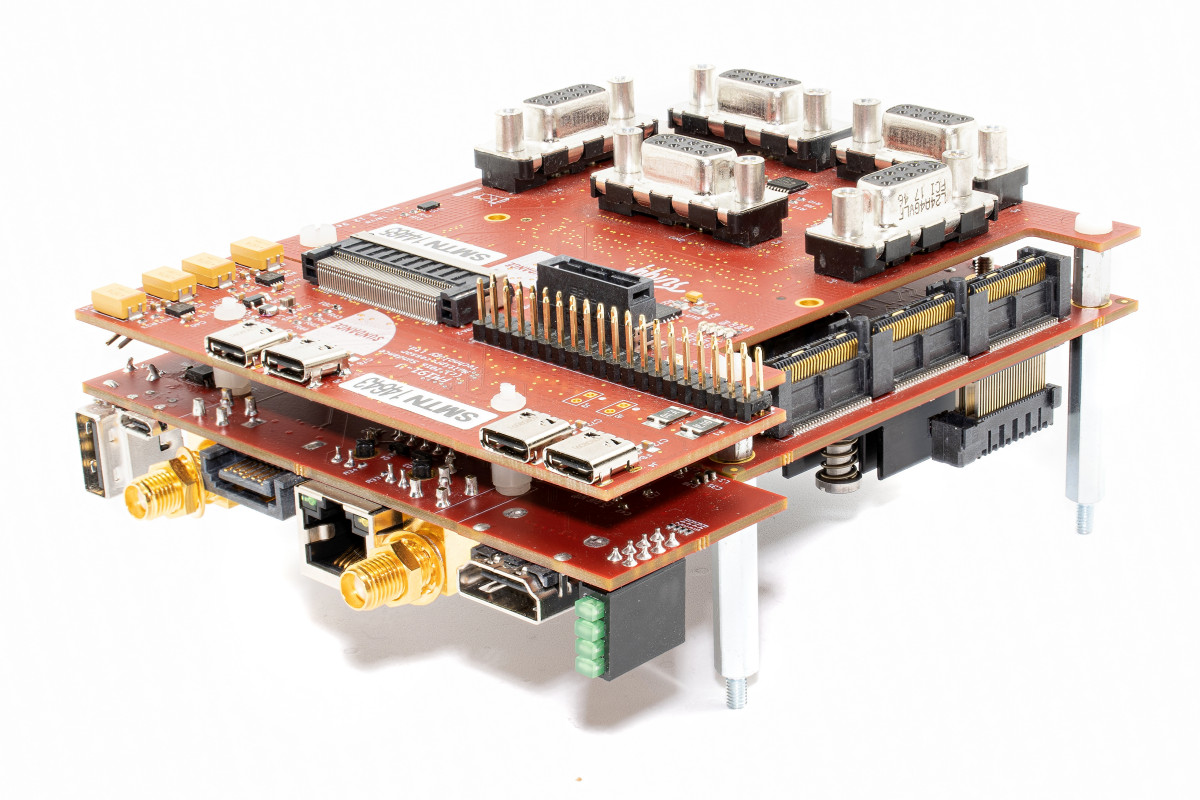 Le système complet VCS-1 avec son module SoM intégré offre de nombreuses fonctionnalités d’entrées/sorties disponibles via la carte d’interface externe SEIC de Sundance. En particulier des interfaces USB 3 pour l’interfaçage de divers appareils photo et capteurs comme les caméras de suivi RealSense T265 et D435 d’Intel ou les caméras thermiques AX-8 de Flir Systems. Il en outre possible de connecter la plupart des actionneurs et capteurs installés sur des plates-formes Arduino et Raspberry Pi. Une interface pour un écran HDMI, un stockage SATA et un port Ethernet permettent de travailler avec la carte comme sur un PC. Enfin, un contrôleur CAN embarqué est disponible pour collecter les données venant de capteurs externes et un convertisseur numérique/analogique AC embarqué assure lla commande d'un servomoteur.
Le système complet VCS-1 avec son module SoM intégré offre de nombreuses fonctionnalités d’entrées/sorties disponibles via la carte d’interface externe SEIC de Sundance. En particulier des interfaces USB 3 pour l’interfaçage de divers appareils photo et capteurs comme les caméras de suivi RealSense T265 et D435 d’Intel ou les caméras thermiques AX-8 de Flir Systems. Il en outre possible de connecter la plupart des actionneurs et capteurs installés sur des plates-formes Arduino et Raspberry Pi. Une interface pour un écran HDMI, un stockage SATA et un port Ethernet permettent de travailler avec la carte comme sur un PC. Enfin, un contrôleur CAN embarqué est disponible pour collecter les données venant de capteurs externes et un convertisseur numérique/analogique AC embarqué assure lla commande d'un servomoteur.
Côté logiciels, la plate-forme robotique ROS Melodic Morenia (compatible avec les systèmes d’exploitation ROS et ROS2), le protocole de connectivité de machine à machine MQTT, la bibliothèque de vision sur ordinateur OpenCV et les solutions Edge-AI de Xilinx, associées au langage de script Python, sont disponibles.
Sont également pris en charge le système d’exploitation Ubuntu, l’environnement SDSoC de Xilinx, la chaîne d’outils STHEM développée dans le cadre du projet européen Tulipp et l’unité de traitement Deep Learning, constitué de réseaux de neurones à convolution, de Xilinx. La solution VCS-1 est disponible dans un boîtier personnalisé, le PC/104-Blade, conçu pour éliminer le besoin de ventilateurs et fournir un environnement robuste pour la création d’applications intégrées en robotique de précision.
Signalons que cette solution a été mise au point et éprouvée dans le cadre du Fast-Track-Innovation du programme H2020 de l’Union européenne à travers le système robotique VineScout qui propose une solution robotique de précision conçue pour faciliter la collecte de données en temps réel dans les vignobles, à partir de laquelle des stratégies améliorées de maturation et de récolte des raisins peuvent être élaborées.