La société chinoise RoboSense, basée à Shenzhen, veut, selon ses dires, révolutionner le monde du lidar en proposant un système de perception intelligent (dénommé RS-IPLS) destiné à équiper dès maintenant en production des voitures plus autonomes.... Ce système haute performance intègre notamment un mécanisme de prétraitement des données en temps réel et une fonction d’analyse spécifique, similaire à celle de l’œil humain.
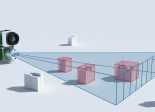
Ce lidar sans aucune pièce mécanique mobile s’appuie sur des circuits Mems pour la détection et génère des nuages de points de couleur en fusionnant les données brutes acquises au niveau matériel (image 2D) et celles fournies par l’algorithme de détection et d’apprentissage profond (deep learning) développé spécifiquement pour répondre au contraintes de la conduite autonome. Cette technologie permet d'obtenir, selon RoboSense, des informations sur les objets détectés afin d’ajuster en temps réel la zone de détection sur la région dite “intéressante” (ROI, Region of Interest).
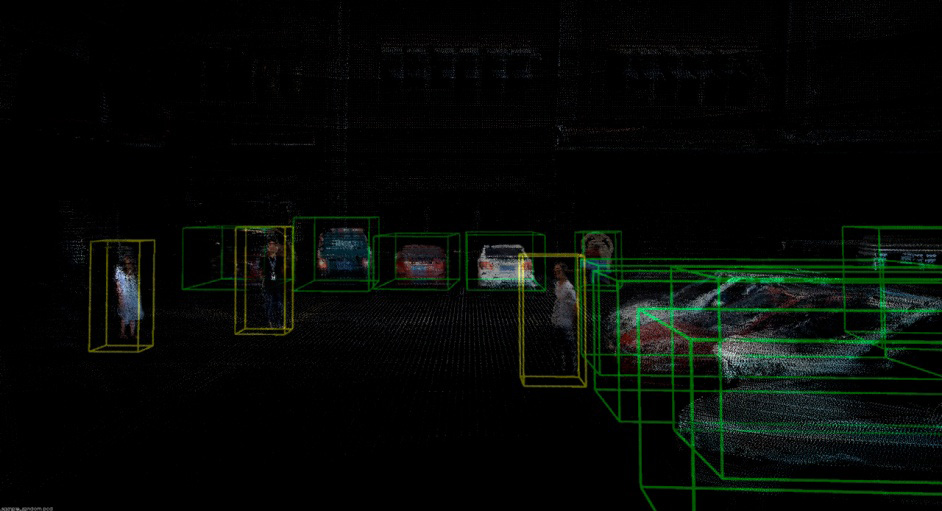
L’innovation au sein du lidar est liée au fait que le système, dès qu'il perçoit une cible dans son champ de vision, initie un mécanisme de traitement qui “verrouille” instantanément la cible pour la traiter à part, obtenant ainsi, toujours selon RoboSense, des données environnementales claires et stables à l’instar du regard humain : distance précise où se situe l'objet, type dudit objet... (photo ci-dessous).
Le système de perception intelligente RS-IPLS de la société chinoise fournit des informations de données spatiales tridimensionnelles riches en injectant notamment trois niveaux de couleur en temps réel sans avoir recours à un processus de fusion réalisé à partir de données externes au lidar. Dans cette approche, le prétraitement des données est effectué par l'algorithme d’intelligence artificielle embarqué qui détecte de manière répétée les obstacles devant la voiture, en réduisant la charge de l'unité centrale de traitement de données.
Le système RS-IPLS de RoboSense s’appuie en fait sur quatre piliers. Le premier est une technologie lidar à semi-conducteur (RS-LiDAR-M1pre) avec une portée de 200 mètres, une résolution angulaire de 0,09° x 0,2°, un angle de vue de 63° sur 20° et un rafraichissement des données de 20 femtosecondes. Les trois autres sont un algorithme de fusion de données entre le lidar et des données externes (capteurs, caméras…), un algorithme d’apprentissage profond et un algorithme spécifique d’analyse d’une zone d’intérêt (espace autour d’un obstacle). La combinaison de ces quatre technologies permet au système lidar de RoboSense d’aller plus loin que les capteurs traditionnels en fournissant selon la société des capacités similaires à celles du système visuel humain.